 М
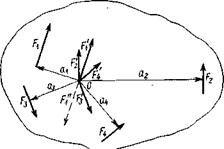
ММетод приведения одной силы к данной точке можно применить к какому угодно числу сил. Допустим, что в некоторых точках тела (рис. 1.24) приложены силы F1 F2, F3 и F4. Требуется привести эти силы к точке О плоскости. Приведем сначала силу
 приложенную в точке А. Приложим в точке О две силы равные порознь по значению заданной силе параллельные ей и направленные в противоположные стороны. В результате приведения силы получим силу
приложенную в точке А. Приложим в точке О две силы равные порознь по значению заданной силе параллельные ей и направленные в противоположные стороны. В результате приведения силы получим силу  , приложенную в точке О, и пару сил
, приложенную в точке О, и пару сил с плечом
с плечом  . Поступив таким же образом с силой
. Поступив таким же образом с силой  , приложенной в точке В, получим силу, приложенную в точке О, и пару сил с плечом
, приложенной в точке В, получим силу, приложенную в точке О, и пару сил с плечом  и т. д. Плоскую систему сил, приложенных в точках А, В, С и D, мы заменили сходящимися силами
и т. д. Плоскую систему сил, приложенных в точках А, В, С и D, мы заменили сходящимися силами  , приложенными в точке О, и парами сил с моментами, равными моментам заданных сил относительно точки О:
, приложенными в точке О, и парами сил с моментами, равными моментам заданных сил относительно точки О: .
.
Сходящиеся в точке силы можно заменить одной силой  равной геометрической сумме составляющих,
равной геометрической сумме составляющих,
равной геометрической сумме составляющих,
Эту силу, равную геометрической сумме заданных сил, называют главным вектором системы сил и обозначают .
.
По величине проекций главного вектора на оси координат находим модуль главного вектора:
На основании правила сложения пар сил их можно заменить результирующей парой, момент которой равен алгебраической сумме моментов заданных сил относительно точки О и называется главным моментом относительно точки приведения

Таким образом, произвольная плоская система сил приводиться к одной силе (главному вектору системы сил) и одному моменту (главному моменту системы сил).
Необходимо усвоить, сто главный вектор не является равнодействующей данной системы сил, так как эта система не эквивалентна одной силе . Так как главный вектор равен геометрической сумме сил заданной системе, то ни модуль, ни направление его не зависит от выбора центра приведения. Значение и знак главного момента зависит от положения центра приведения, так как плечи составляющих пар зависят от взаимного положения сил и точки (центра) относительно которой берутся моменты.
не является равнодействующей данной системы сил, так как эта система не эквивалентна одной силе . Так как главный вектор равен геометрической сумме сил заданной системе, то ни модуль, ни направление его не зависит от выбора центра приведения. Значение и знак главного момента зависит от положения центра приведения, так как плечи составляющих пар зависят от взаимного положения сил и точки (центра) относительно которой берутся моменты.
Частные случаи приведения системы сил:
1)  ; система находиться в равновесии, т.е. для равновесия плоской системы сил необходимо и достаточно, чтобы ее главный вектор и главный момент одновременно были равны нулю.
; система находиться в равновесии, т.е. для равновесия плоской системы сил необходимо и достаточно, чтобы ее главный вектор и главный момент одновременно были равны нулю.
; система находиться в равновесии, т.е. для равновесия плоской системы сил необходимо и достаточно, чтобы ее главный вектор и главный момент одновременно были равны нулю.
2) тело вращается вокруг неподвижной оси ;система приводиться к паре сил, момент которой равен главному моменту.
тело вращается вокруг неподвижной оси ;система приводиться к паре сил, момент которой равен главному моменту.
тело вращается вокруг неподвижной оси ;система приводиться к паре сил, момент которой равен главному моменту.
3)  тело движется прямолинейно ускоренно; система приводиться к одной равнодействующей, равной главному вектору системы.
тело движется прямолинейно ускоренно; система приводиться к одной равнодействующей, равной главному вектору системы.
тело движется прямолинейно ускоренно; система приводиться к одной равнодействующей, равной главному вектору системы.
4)  - общий случай; система приводиться к главному вектору и к главному моменту.
- общий случай; система приводиться к главному вектору и к главному моменту.
- общий случай; система приводиться к главному вектору и к главному моменту.
Комментариев нет:
Отправить комментарий